
Arduino Control Car
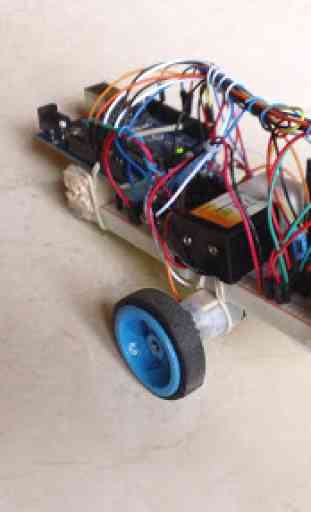
Bluetooth controllata dal Arduino per applicazioni come le automobili, Brazos acrobatici, Telecomando, automazione, ecc ...
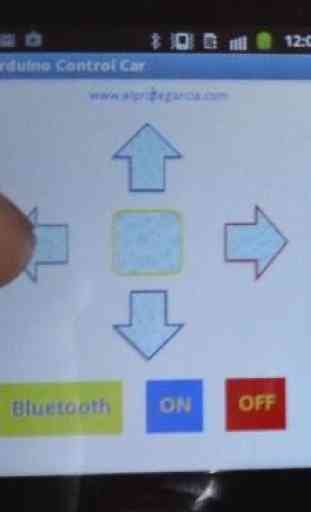
Inviando questo app dal modulo Bluetooth:
Freccia = carattere 'A'
Freccia sinistra = carattere 'b'
Pulsante quadrato = carattere 'c'
Freccia destra = carattere 'd'
Freccia giù = Carattere 'e'
Pin ON = Character 'f'
Pin OFF = Character 'g'
Pin Bluetooth = è quello di selezionare il modulo Bluetooth a cui ci si connette
(Il modulo Bluetooth deve prima essere sincronizzato con il telefono Android
Provare a connettersi LED per il PWM 5, 6, 9, 10 porte Arduino, nel progetto finale per i porti del ponte H è collegato al Arduino Caricare il seguente codice:
izqA int = 5;
izqB int = 6;
Dera int = 9;
Derb int = 10;
vel int = 255; // motori Velocità (0-255)
int status = 'g'; // Inizia arrestati
void setup () {
Serial.begin (9600); // Avvia la porta seriale per la comunicazione con Bluetooth
pinMode (DERA, OUTPUT);
pinMode (Derb, OUTPUT);
pinMode (izqA, OUTPUT);
pinMode (izqB, OUTPUT);
}
void loop () {
if (Serial.available ()> 0) {// leggere il bluetooth e conservati in stato di
status = Serial.read ();
}
if (condizione == 'a') {// sposta il pulsante frontale
analogWrite (Derb, 0);
analogWrite (izqB, 0);
analogWrite (DERA, vel);
analogWrite (izqA, vel);
}
if (condizione == 'b') {// Pulsante sinistro
analogWrite (Derb, 0);
analogWrite (izqB, 0);
analogWrite (DERA, 0);
analogWrite (izqA, vel);
}
if (condizione == 'c') {// pulsante Stop
analogWrite (Derb, 0);
analogWrite (izqB, 0);
analogWrite (DERA, 0);
analogWrite (izqA, 0);
}
if (condizione == 'd') {// Button DER
analogWrite (Derb, 0);
analogWrite (izqB, 0);
analogWrite (izqA, 0);
analogWrite (DERA, vel);
}
if (condizione == 'e') {// Button Reverse
analogWrite (DERA, 0);
analogWrite (izqA, 0);
analogWrite (Derb, vel);
analogWrite (izqB, vel);
}
if (condizione == 'f') {// pulsante ON per Distanza di rilevamento movimenti
}
if (condizione == 'g') {// OFF, arresta il motore non fa nulla
}
}
Inviando questo app dal modulo Bluetooth:
Freccia = carattere 'A'
Freccia sinistra = carattere 'b'
Pulsante quadrato = carattere 'c'
Freccia destra = carattere 'd'
Freccia giù = Carattere 'e'
Pin ON = Character 'f'
Pin OFF = Character 'g'
Pin Bluetooth = è quello di selezionare il modulo Bluetooth a cui ci si connette
(Il modulo Bluetooth deve prima essere sincronizzato con il telefono Android
Provare a connettersi LED per il PWM 5, 6, 9, 10 porte Arduino, nel progetto finale per i porti del ponte H è collegato al Arduino Caricare il seguente codice:
izqA int = 5;
izqB int = 6;
Dera int = 9;
Derb int = 10;
vel int = 255; // motori Velocità (0-255)
int status = 'g'; // Inizia arrestati
void setup () {
Serial.begin (9600); // Avvia la porta seriale per la comunicazione con Bluetooth
pinMode (DERA, OUTPUT);
pinMode (Derb, OUTPUT);
pinMode (izqA, OUTPUT);
pinMode (izqB, OUTPUT);
}
void loop () {
if (Serial.available ()> 0) {// leggere il bluetooth e conservati in stato di
status = Serial.read ();
}
if (condizione == 'a') {// sposta il pulsante frontale
analogWrite (Derb, 0);
analogWrite (izqB, 0);
analogWrite (DERA, vel);
analogWrite (izqA, vel);
}
if (condizione == 'b') {// Pulsante sinistro
analogWrite (Derb, 0);
analogWrite (izqB, 0);
analogWrite (DERA, 0);
analogWrite (izqA, vel);
}
if (condizione == 'c') {// pulsante Stop
analogWrite (Derb, 0);
analogWrite (izqB, 0);
analogWrite (DERA, 0);
analogWrite (izqA, 0);
}
if (condizione == 'd') {// Button DER
analogWrite (Derb, 0);
analogWrite (izqB, 0);
analogWrite (izqA, 0);
analogWrite (DERA, vel);
}
if (condizione == 'e') {// Button Reverse
analogWrite (DERA, 0);
analogWrite (izqA, 0);
analogWrite (Derb, vel);
analogWrite (izqB, vel);
}
if (condizione == 'f') {// pulsante ON per Distanza di rilevamento movimenti
}
if (condizione == 'g') {// OFF, arresta il motore non fa nulla
}
}
Categoria : Comunicazione
Ricerche associate
Fa schifo, non scaricatelo.Pessimo