
Bluetooth Arduino Carro Robot
Controllo Arduino via Bluetooth per quattro movimenti principali. Può servire gru, camion, armi e altro ancora.
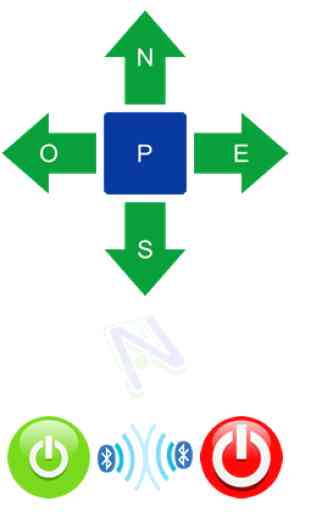
I dati inviati dalla APP
Arrow N "Norte" = 'n'
Freccia S "Sud" 's' =
Arrow O "Occidente" = "o"
Freccia E "questo" = 'e'
Arrow P "Stop" = 'p'
Green Button "Power" = 'h'
Perno rosso "Off" = 'l'
Home // CODICE
Petto int = 4; // definisce petto come (eco) per ultrasuoni
Ptrig int = 5; // definisce Ptrig come (TRIG) per ultrasuoni
int LaIzAn = 6; // Turn Left Side in senso antiorario
int Laizhou = 7; // Giro Ore Lato sinistro
int LaDeHo = 8; // Ore Lato destro Giro
sezioni int torsione = 9; // Turn Right Side antiorario
Mov int = 255; // motore di movimento (0-255)
int status = 'l'; // inizia arrestati
int length, distanza; // Per calcolare distacia
void setup () {
Serial.begin (9600); // avviare la porta seriale per la comunicazione con Bluetooth
pinMode (LaDeHo, OUTPUT);
pinMode (sezioni torsione, OUTPUT)
pinMode (Laizhou, OUTPUT);
pinMode (LaIzAn, OUTPUT);
pinMode (cassa, INPUT); // ho definito come pin di ingresso 4 (eco)
pinMode (Ptrig, OUTPUT); // definire pin di uscita 5 (trig)
}
void loop () {
if (Serial.available ()> 0) {// legge e memorizza lo stato del bluetooth
Stato Serial.read = ();
}
if (condizione == 'n') {// progredire "Nord"
analogWrite (sezioni torsione, 0);
analogWrite (LaIzAn, 0);
analogWrite (LaDeHo, Mov);
analogWrite (Laizhou, Mov);
}
if (condizione == 's') {// Spostare indietro "Sur"
analogWrite (sezioni torsione, Mov);
analogWrite (LaIzAn, Mov);
analogWrite (LaDeHo, 0);
analogWrite (Laizhou, 0);
}
se (stato == 'o') {// Move LadDerecha "Occidente"
analogWrite (sezioni torsione, 0);
analogWrite (LaIzAn, 0);
analogWrite (Laizhou, 0);
analogWrite (LaDeHo, Mov);}
se (stato == 'e') {// Move LadIzquierdo "Questo"
analogWrite (sezioni torsione, 0);
analogWrite (LaIzAn, 0);
analogWrite (Laizhou, Mov);
analogWrite (LaDeHo, 0);
}
se (stato == 'p') {// arresto; Interrompe motori
analogWrite (sezioni torsione, 0);
analogWrite (LaIzAn, 0);
analogWrite (LaDeHo, 0);
analogWrite (Laizhou, 0);
}
se {// Green Button modalità automatica del sensore ad ultrasuoni (stato == 'h')
digitalWrite (Ptrig, HIGH); // genera l'impulso di trigger per 10US
ritardo (0,01);
digitalWrite (Ptrig, LOW);
Durata = pulseIn (petto, HIGH); // leggere l'ora Echo
distanza = (lunghezza / 2) / 29; // calcola la distanza in piedi
ritardo (10);
if (distanza <= 15 && distanza> = 2) {// se la distanza è inferiore di 15 cm
analogWrite (sezioni torsione, 0); // Arrestare il motore da 1/4 di secondo
analogWrite (LaIzAn, 0);
analogWrite (LaDeHo, 0);
analogWrite (Laizhou, 0);
ritardo (250);
analogWrite (LaDeHo, 0);
analogWrite (Laizhou, 0);
analogWrite (sezioni torsione, Mov); // per 1/2 secondo Reverse
analogWrite (LaIzAn, Mov);
ritardo (500);
analogWrite (sezioni torsione, 0); // Girare per 1 secondo
analogWrite (LaIzAn, 0);
analogWrite (LaDeHo, 0);
analogWrite (Laizhou, Mov);
ritardo (1000);
}
else {// Se nessun ostacolo viene spostato in avanti
analogWrite (sezioni torsione, 0);
analogWrite (LaIzAn, 0);
analogWrite (LaDeHo, Mov);
analogWrite (Laizhou, Mov);
}
}
se (stato == 'l') {// tasto OFF, il motore si ferma.
analogWrite (sezioni torsione, 0);
analogWrite (LaIzAn, 0);
analogWrite (LaDeHo, 0);
analogWrite (Laizhou, 0);
}
}
// END CODE
Altri manuali http://manual.netandino.net
Tutti i dettagli del carrello
https://netandino.blogspot.com/2015/02/armar-carro-robot-controlado-por.html
I dati inviati dalla APP
Arrow N "Norte" = 'n'
Freccia S "Sud" 's' =
Arrow O "Occidente" = "o"
Freccia E "questo" = 'e'
Arrow P "Stop" = 'p'
Green Button "Power" = 'h'
Perno rosso "Off" = 'l'
Home // CODICE
Petto int = 4; // definisce petto come (eco) per ultrasuoni
Ptrig int = 5; // definisce Ptrig come (TRIG) per ultrasuoni
int LaIzAn = 6; // Turn Left Side in senso antiorario
int Laizhou = 7; // Giro Ore Lato sinistro
int LaDeHo = 8; // Ore Lato destro Giro
sezioni int torsione = 9; // Turn Right Side antiorario
Mov int = 255; // motore di movimento (0-255)
int status = 'l'; // inizia arrestati
int length, distanza; // Per calcolare distacia
void setup () {
Serial.begin (9600); // avviare la porta seriale per la comunicazione con Bluetooth
pinMode (LaDeHo, OUTPUT);
pinMode (sezioni torsione, OUTPUT)
pinMode (Laizhou, OUTPUT);
pinMode (LaIzAn, OUTPUT);
pinMode (cassa, INPUT); // ho definito come pin di ingresso 4 (eco)
pinMode (Ptrig, OUTPUT); // definire pin di uscita 5 (trig)
}
void loop () {
if (Serial.available ()> 0) {// legge e memorizza lo stato del bluetooth
Stato Serial.read = ();
}
if (condizione == 'n') {// progredire "Nord"
analogWrite (sezioni torsione, 0);
analogWrite (LaIzAn, 0);
analogWrite (LaDeHo, Mov);
analogWrite (Laizhou, Mov);
}
if (condizione == 's') {// Spostare indietro "Sur"
analogWrite (sezioni torsione, Mov);
analogWrite (LaIzAn, Mov);
analogWrite (LaDeHo, 0);
analogWrite (Laizhou, 0);
}
se (stato == 'o') {// Move LadDerecha "Occidente"
analogWrite (sezioni torsione, 0);
analogWrite (LaIzAn, 0);
analogWrite (Laizhou, 0);
analogWrite (LaDeHo, Mov);}
se (stato == 'e') {// Move LadIzquierdo "Questo"
analogWrite (sezioni torsione, 0);
analogWrite (LaIzAn, 0);
analogWrite (Laizhou, Mov);
analogWrite (LaDeHo, 0);
}
se (stato == 'p') {// arresto; Interrompe motori
analogWrite (sezioni torsione, 0);
analogWrite (LaIzAn, 0);
analogWrite (LaDeHo, 0);
analogWrite (Laizhou, 0);
}
se {// Green Button modalità automatica del sensore ad ultrasuoni (stato == 'h')
digitalWrite (Ptrig, HIGH); // genera l'impulso di trigger per 10US
ritardo (0,01);
digitalWrite (Ptrig, LOW);
Durata = pulseIn (petto, HIGH); // leggere l'ora Echo
distanza = (lunghezza / 2) / 29; // calcola la distanza in piedi
ritardo (10);
if (distanza <= 15 && distanza> = 2) {// se la distanza è inferiore di 15 cm
analogWrite (sezioni torsione, 0); // Arrestare il motore da 1/4 di secondo
analogWrite (LaIzAn, 0);
analogWrite (LaDeHo, 0);
analogWrite (Laizhou, 0);
ritardo (250);
analogWrite (LaDeHo, 0);
analogWrite (Laizhou, 0);
analogWrite (sezioni torsione, Mov); // per 1/2 secondo Reverse
analogWrite (LaIzAn, Mov);
ritardo (500);
analogWrite (sezioni torsione, 0); // Girare per 1 secondo
analogWrite (LaIzAn, 0);
analogWrite (LaDeHo, 0);
analogWrite (Laizhou, Mov);
ritardo (1000);
}
else {// Se nessun ostacolo viene spostato in avanti
analogWrite (sezioni torsione, 0);
analogWrite (LaIzAn, 0);
analogWrite (LaDeHo, Mov);
analogWrite (Laizhou, Mov);
}
}
se (stato == 'l') {// tasto OFF, il motore si ferma.
analogWrite (sezioni torsione, 0);
analogWrite (LaIzAn, 0);
analogWrite (LaDeHo, 0);
analogWrite (Laizhou, 0);
}
}
// END CODE
Altri manuali http://manual.netandino.net
Tutti i dettagli del carrello
https://netandino.blogspot.com/2015/02/armar-carro-robot-controlado-por.html
Categoria : Istruzione
Ricerche associate