

RoboCam
Usando RoboCam puoi controllare i tuoi robot LEGO Mindstorms EV3, Android o Raspberry Pi.
Guida rapida (solo per chi ha un kit educativo di LEGO Mindstorms EV3 (45544)):
1. Assemblare il ricercatore EV3 (l'istruzione: https://goo.gl/yPU4sa), accenderlo e assicurarsi che Bluetooth funzioni.
2. Installa l'app RoboCam su uno smartphone (di seguito, Telefono 1).
3. Attivare il Bluetooth del telefono 1 e accertarsi che Telefono 1 ed EV3 siano collegati tramite Bluetooth (devono essere associati).
4. Collega il telefono 1 e lo smartphone che utilizzerai per controllare il robot (in seguito, Telefono 2) sullo stesso router Wi-Fi.
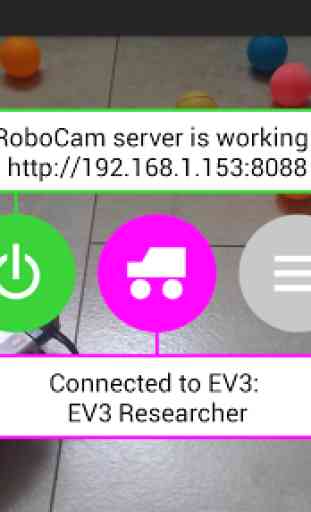
5. Avviare un server RoboCam. Per questo premere il pulsante verde a sinistra.
6. Collegare il telefono 1 al robot. Per questo spingere il pulsante magenta nel mezzo.
7. Apri Google Chrome sul telefono 2 e vai al link mostrato nell'app RoboCam su Telefono 1.
8. Accedere a Telefono 2 (per impostazione predefinita utilizzare admin e 123).
9. Sul telefono 2 compaiono due joystick e il video dalla videocamera del telefono 1. Bloccare il telefono e collegarlo al robot.
10. Ora puoi controllare il tuo robot tramite Phone 2.
Se si dispone di un kit per la casa di LEGO Mindstorms EV3 (31313) o si desidera controllare altri robot EV3 invece di Researcher EV3, è necessario configurare l'app RoboCam. Vedi le impostazioni RoboCam.
Per utilizzare l'applicazione è necessario conoscere due cose: come impostare la connessione e come avviene il controllo.
Questo è il manuale rapido sull'impostazione della connessione standard. Esigenza: robot EV3, smartphone Android con RoboCam installato (di seguito, Telefono 1) e smartphone o tablet (Android, iOS o Windows) con un browser moderno supportato HTML5 (di seguito, il Telefono 2). Il telefono 1 è collegato all'EV3 tramite Bluetooth (i dispositivi devono essere pre-associati!). Dopo aver avviato il server RoboCam sul telefono 1 e aver collegato il telefono 1 e il telefono 2 allo stesso router WiFi, è possibile connettersi al server RoboCam (al telefono 1) tramite browser (da Telefono 2). Per fare ciò, è necessario scrivere l'indirizzo nel campo dell'indirizzo del browser che verrà mostrato in RoboCam ad esempio, http://192.168.1.2:8088
Questa è la breve descrizione di come avviene il controllo. Dopo aver effettuato il collegamento al server RoboCam tramite un browser di Phone 2 e accedendo all'applicazione Web RoboCam, vedrai tutto ciò che vede la telecamera di Phone 1. Collega il telefono 1 al tuo robot, quindi la sua videocamera è diretta in avanti. L'app Web sul telefono 2 può avere da 1 a 4 joystick per controllare il robot in base alle impostazioni. Quando si tocca il joystick, le coordinate dei punti di tocco vengono trasferite all'applicazione RoboCam su Telefono 1 e quindi, a seconda delle impostazioni del joystick, vengono trasformate nei comandi motore EV3 o inviate alle cassette postali EV3. Se le coordinate vengono inviate alle caselle di posta, è necessario scrivere un ulteriore programma EV3 per elaborarle. I nomi delle caselle di posta sono i seguenti: xey - joystick 1, w ez - joystick 2, aeb - joystick 3, c e d - joystick 4.
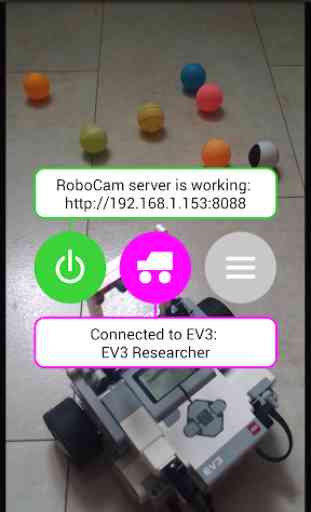
Per impostazione predefinita, l'applicazione ha un'impostazione per solo uno dei robot - "EV3 Researcher", che è possibile vedere sul video.È possibile assemblare EV3 Researcher da un kit educativo di LEGO Mindstorms EV3 (45544). : https://goo.gl/yPU4sa
Guida rapida (solo per chi ha un kit educativo di LEGO Mindstorms EV3 (45544)):
1. Assemblare il ricercatore EV3 (l'istruzione: https://goo.gl/yPU4sa), accenderlo e assicurarsi che Bluetooth funzioni.
2. Installa l'app RoboCam su uno smartphone (di seguito, Telefono 1).
3. Attivare il Bluetooth del telefono 1 e accertarsi che Telefono 1 ed EV3 siano collegati tramite Bluetooth (devono essere associati).
4. Collega il telefono 1 e lo smartphone che utilizzerai per controllare il robot (in seguito, Telefono 2) sullo stesso router Wi-Fi.
5. Avviare un server RoboCam. Per questo premere il pulsante verde a sinistra.
6. Collegare il telefono 1 al robot. Per questo spingere il pulsante magenta nel mezzo.
7. Apri Google Chrome sul telefono 2 e vai al link mostrato nell'app RoboCam su Telefono 1.
8. Accedere a Telefono 2 (per impostazione predefinita utilizzare admin e 123).
9. Sul telefono 2 compaiono due joystick e il video dalla videocamera del telefono 1. Bloccare il telefono e collegarlo al robot.
10. Ora puoi controllare il tuo robot tramite Phone 2.
Se si dispone di un kit per la casa di LEGO Mindstorms EV3 (31313) o si desidera controllare altri robot EV3 invece di Researcher EV3, è necessario configurare l'app RoboCam. Vedi le impostazioni RoboCam.
Per utilizzare l'applicazione è necessario conoscere due cose: come impostare la connessione e come avviene il controllo.
Questo è il manuale rapido sull'impostazione della connessione standard. Esigenza: robot EV3, smartphone Android con RoboCam installato (di seguito, Telefono 1) e smartphone o tablet (Android, iOS o Windows) con un browser moderno supportato HTML5 (di seguito, il Telefono 2). Il telefono 1 è collegato all'EV3 tramite Bluetooth (i dispositivi devono essere pre-associati!). Dopo aver avviato il server RoboCam sul telefono 1 e aver collegato il telefono 1 e il telefono 2 allo stesso router WiFi, è possibile connettersi al server RoboCam (al telefono 1) tramite browser (da Telefono 2). Per fare ciò, è necessario scrivere l'indirizzo nel campo dell'indirizzo del browser che verrà mostrato in RoboCam ad esempio, http://192.168.1.2:8088
Questa è la breve descrizione di come avviene il controllo. Dopo aver effettuato il collegamento al server RoboCam tramite un browser di Phone 2 e accedendo all'applicazione Web RoboCam, vedrai tutto ciò che vede la telecamera di Phone 1. Collega il telefono 1 al tuo robot, quindi la sua videocamera è diretta in avanti. L'app Web sul telefono 2 può avere da 1 a 4 joystick per controllare il robot in base alle impostazioni. Quando si tocca il joystick, le coordinate dei punti di tocco vengono trasferite all'applicazione RoboCam su Telefono 1 e quindi, a seconda delle impostazioni del joystick, vengono trasformate nei comandi motore EV3 o inviate alle cassette postali EV3. Se le coordinate vengono inviate alle caselle di posta, è necessario scrivere un ulteriore programma EV3 per elaborarle. I nomi delle caselle di posta sono i seguenti: xey - joystick 1, w ez - joystick 2, aeb - joystick 3, c e d - joystick 4.
Per impostazione predefinita, l'applicazione ha un'impostazione per solo uno dei robot - "EV3 Researcher", che è possibile vedere sul video.È possibile assemblare EV3 Researcher da un kit educativo di LEGO Mindstorms EV3 (45544). : https://goo.gl/yPU4sa
Categoria : Istruzione
Ricerche associate